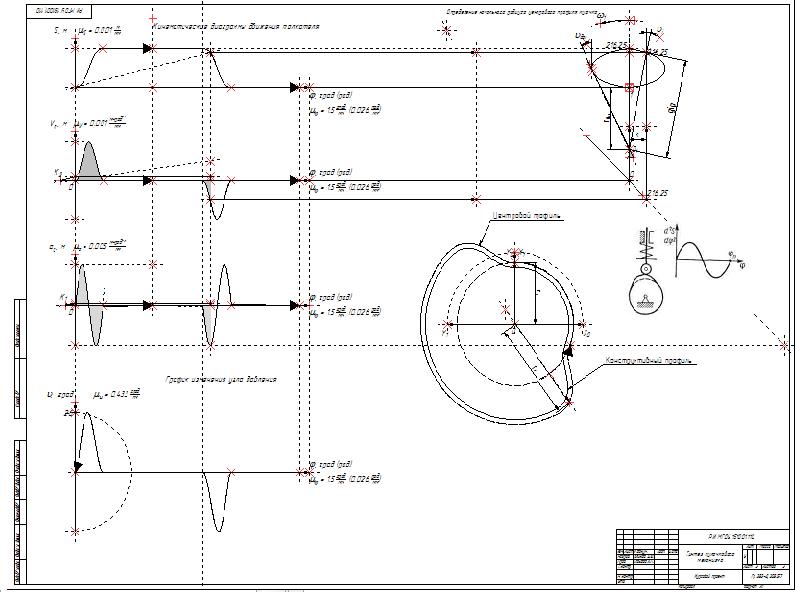
| СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА Вытяжной пресс [8, с. 88-90, тема 11, рисунок 17, таблица 61] включает ку-лачковый механизм зажимного устройства, схематично показанный на рисунке 3.1 с графиком изменения аналога ускорения по синусоидальному закону [2, с. 24-25, таблица 2]. Рисунок 3.1 – Схема кулачкового механизма зажимного устройства с графиком изменения аналога ускорения по синусоидальному закону Исходные данные:
Фазовые углы поворота кулачка: ;
Ход толкателя: ;
Максимально допустимый угол давления: ;
Частота вращения кулачка: ;
Масса толкателя: mТ = 65 кг. Исходными данными также является безразмерный график изменения ускоре-ния толкателя в пределах рабочего угла (рисунок 3.1). Эта зависимость приведена также на листе 3 графической части проекта. При ее построении использовался типовой синусоидальный закон движения толкателя: , , .
3.1 Построение кинематических диаграмм и расчет масштабов По заданному закону изменения второй производной от пере¬мещения выходно-го звена по углу поворота кулачка построим графики первой производной и пере-мещения выходного звена в зависимости от угла поворота кулачка. Определим масштабы построений.
Кинематические диаграммы могут быть получены как графически, так и ана-литически. Построим графики требуемых функций графическим интегрированием [4], проводя осреднение по равенству площадей криволинейной трапеции и прямо-угольника. Интегрируем график ускорения и, полученный после этой операции, гра-фик скорости, получая при этом график перемещений толкателя. Отрезки интегри-рования принимались равными:
К1 = 10 мм,
К2 = 15 мм.
.
Для вычисления масштабного коэффициента по оси зададимся значением базы b графиков по оси абсцисс:
b = 240 мм.
Вычисляем масштабный коэффициент для осей абсцисс графиков:
.
Используя заданный ход толкателя, находим масштабные коэффициенты для осей :
,
.
Графики функций в определенных масштабах приведены на листе 3 графиче-ской части проекта. 3.2 Определение основных размеров кулачкового механизма наимень¬ших га-баритов с учетом допускаемого угла давления Для кулачковых механизмов с роликовым выходным звеном минимальный радиус кулачка и другие основные размеры (для некото¬рых схем) определяются по допус-каемому углу давления или минимальному углу передачи пу-тем графического определения области возможного расположения центра вращения кулачка [8].
Для кулачковых механизмов с роликовым толкателем при враще¬нии кулачка по направлению часовой стрелки величина на фазе удаления откладыва-ется вправо.
Область расположения центра вращения кулачка строим, придавая геометри-ческую интерпретацию ограничениям по углу давления . Значения масштабов, во избежание искажения изображения угла , выбираются одинаковыми. По касатель-ным к кривой фазового портрета, под углом к вертикали проводят прямые, которые при пересечении образуют область допустимых решений, в которой выпол-няются ограничения по допустимому углу давления. В допустимой области выби-раем точку расположения центра кулачка наименьших габаритов. Из построений начальный радиус центрового профиля кулачка равен: . Размер эксцентриситета e кулачкового механизма на чертеже равен: e = 0. 3.3 Построение центрового и конструктивного профилей кулачка Для кулачковых механизмов с роликовым выходным звеном способом обраще-ния движения строится центровой профиль кулачка, а затем определяется допус-каемое значение радиуса ролика rр из условий: rр ≤ 0,8мин и rр < 0,4Rmin, где мин — минимальный радиус кривизны для выпуклых участков центрового профиля кулачка; Rmin — минимальный радиус центрового профиля кулачка [8].
Минимальный радиус кривизны определяется приближенно как ра¬диус окруж-ности, проходящей через три точки, которые выбираются на участке центрового профиля, где можно ожидать получения мини¬мального значения радиуса кривизны.
Минимальный радиус кривизны определяется также программными средствами: с помощью функциональной возможности анализа геометрии САПР «Т-Flex CAD 3D». При этом сначала строится функция, образующая центровой профиль кулачка, за-тем, на основе этой функции – 3D путь, для чего предварительно необходимо по-строить рабочую плоскость, например, стандартную «Вид спереди». Для построен-ного таким образом 3D пути доступны инструменты анализа его геометрии, позво-ляющие определять в любой точке кривой ее кривизну, радиус кривизны и минималь-ное их значение. В результате имеем: Rmin = 13.012507 мм; мин = 16.538999 мм.
Принятое значение радиуса ролика: rр = 5 мм.
После определения радиуса ролика строится конструктивный профиль кулач-ка как огибающая семейства окружностей радиуса rр, центры которых расположены на центровом профиле.
Т.к. центровой и конструктивный профили кулачка являются эквидистантны-ми кривыми, то построение конструктивного профиля кулачка выполняется также средствами «T –Flex CAD»: с помощью команды «Построить эквидистанту». Пара-метром эквидистанты является принятое значение радиуса ролика. 3.4 Определение предвари¬тельного натяжения и жесткости замыкающей пружины Для механизмов с силовым замыканием определение предвари¬тельного натя-жения и жесткости замыкающей пружины производят считая, что наибольшая сила пружины в 1,5-2 раза превышает наибольшую силу инерции выходного звена в об-ласти, где возможен отрыв выход¬ного звена от поверхности кулачка, а предвари-тельное натяжение пружины составляет 20-40 % ее наибольшего значения [8].
Область, где возможен отрыв выход¬ного звена от поверхности кулачка опре-деляем, анализируя полученный профиль кулачка и кинематическую диаграмму уско-рений. Очевидно, что максимальное отрицательное ускорение толкателя при кото-ром возможен отрыв выход¬ного звена от поверхности кулачка соответствует сле-дующему значению обобщенной координаты:
.
Линейное ускорение а толкателя в аналитическом виде можно определить следующим образом:
a = (1)2 + ε1 ,
где 1 – угловая частота вращения кулачка, с-1; и - аналоги ускорения и скорости толкателя соответственно; ε1 – угловое ускорение кулачка, с-2 [1]. Со-гласно исходным данным кулачок вращается с постоянной частотой вращения . Тогда линейное ускорение a толкателя при
a = (1)2 , a = ( /30)2 , a = (45/30)2 (-0,2105) = -4.676 м/с-2.
Наибольшая сила Ф инерции выходного звена в области, где возможен отрыв выход¬ного звена от поверхности кулачка
Ф = -mTa = -65 (-4.676) = 280.57 Н.
Наибольшая сила Р пружины
Р = 1,75Ф = 490.998 Н.
Предварительное натяжение Рo пружины
Рo = 0,33Р = 162.029 Н.
Жесткость С пружины
С = (Р-Po)/S = 16463.61 Н/м,
где S – значение перемещения толкателя, при котором возможен отрыв выход¬ного звена от поверхности кулачка (определяется с помощью кинематической диаграм-мы перемещения толкателя), м. 3.5 Построение графика изменения угла давления Для построения графика угла давления в каждом положении замеряется угол между направлением вектора скорости и направлением действия силы. По измерен-ным значениям строится график . При построении графика средствами «T -Flex CAD» используется методика [4].
|